立体几何
参考资料
基础知识
分类
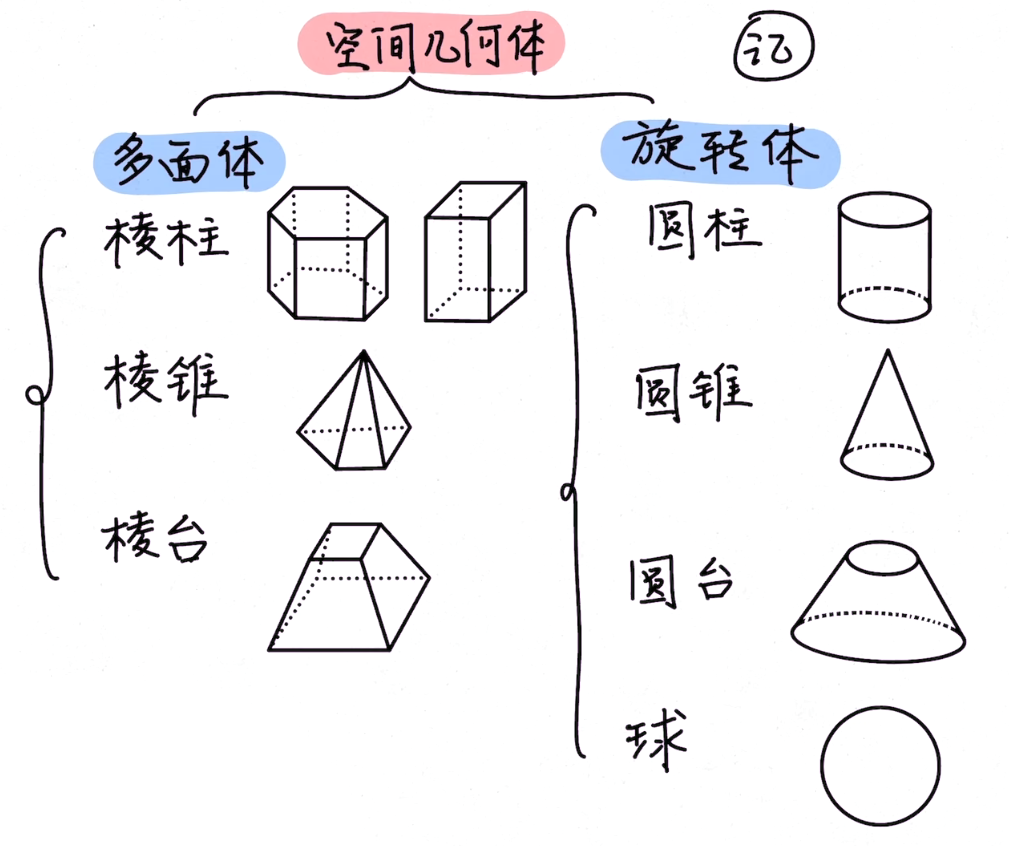
多面体是指三维空间中由平面多边形、直边和顶点组成的几何形状。多面体表面积通用公式就是将每一个平面多边形的面积相加求和。
旋转体是指平面曲线以同一平面内的一条直线作为旋转轴进行旋转所形成的立体几何图形。
斜二测画法
将平面 轴不变, 轴向右倾斜 并长度缩短到原来的 ,称为斜二测画法,画出来的图称为直观图。
容易知道,直观图的面积是原图形的 ,原图形的面积是直观图的 倍。
竖直的 轴也不变,称所画出的图形称为直观图。
祖暅原理
祖暅(gèng)之《缀术》有云:「缘幂势既同,则积不容异」。
祖暅原理(也称等幂等积定理)指出:所有等高处横截面积相等的两个等高的立体,其体积也必然相等。经典推论是,两个等高的立体,如果其所有等高处横截面积相等,则其体积必然相等。
辛普森法则
设拟柱体的高为 ,如果用平行于底面的平面去截该图形,所得到的截面面积是与到底面之间距离 的不超过 次的函数,那么该拟柱体的体积 为:
其描述的是辛普森积分法(一种数值积分方法):
欧拉公式
欧拉公式表述为:,即顶点数 Vertex 棱数 Edge 面数 Face 。
| 正多面体 | 面数 | 棱数 | 顶点数 | 每面边数 | 每顶点棱数 | 备注 |
|---|---|---|---|---|---|---|
| 正四面体 | ||||||
| 正六面体 | 即正方体 | |||||
| 正八面体 | 两个正四棱锥上下叠在一起 | |||||
| 正十二面体 | ||||||
| 正二十面体 |
位置关系
立体几何的核心是研究 点、直线、平面 之间的 位置关系。下文中用 表示直线, 表示平面, 表示点。
平面的基本事实
刻画「平面是怎样的」由 条 基本事实(公理)和若干推论给出。
| 编号 | 内容 | 直观 |
|---|---|---|
| 公理 1 | 如果一条直线上的 两点 在平面内,那么这条直线在该平面内 | 平面是「平」的 |
| 公理 2 | 过 不共线的三点,有且只有 一个平面 | 三点定面 |
| 公理 3 | 如果两个不重合的平面有 一个公共点,那么它们有且只有 一条 过该点的公共直线 | 两面相交于线 |
由此可推出 条推论:
- 推论 :过 一直线及线外一点 有且只有一个平面。
- 推论 :过 两条相交直线 有且只有一个平面。
- 推论 :过 两条平行直线 有且只有一个平面。
公理 1 是「定线在面」、公理 2 是「定面」、公理 3 是「定交线」——分别从「直线、点、平面」三个不同角度刻画平面。
直线与直线
空间两直线的位置关系共有 种:
| 关系 | 定义 | 是否共面 |
|---|---|---|
| 相交 | 有且只有一个公共点 | 共面 |
| 平行 | 在同一平面内,且 没有 公共点 | 共面 |
| 异面 | 不同在 任何一个平面内 | 不共面 |
异面直线 是空间几何特有的现象。判定方法:
- 定义法:证明两直线不共面。
- 反证法:假设共面,推出矛盾。
- 结论:若一条直线 在平面 内,另一条直线 与 交于点 ,且 ,则 异面。
异面直线所成角:将其中一条直线 平移 与另一条相交,所成的 锐角或直角 即为所求,。
等角定理:如果一个角的 两边 与另一个角的 两边 分别平行,则这两个角 相等 或 互补。
直线与平面
直线与平面的位置关系共有 种:
| 关系 | 定义 | 交点个数 |
|---|---|---|
| 直线在平面内 | 直线上 所有点 都在平面内 | 无数个 |
| 相交 | 只有 一个 公共点 | 个 |
| 平行 | 无公共点 | 个 |
平面与平面
两个平面的位置关系共有 种:
| 关系 | 定义 |
|---|---|
| 相交 | 有一条 公共直线 |
| 平行 | 无 公共点 |
空间中的平行关系
线面平行
判定定理:若 平面外 的一条直线,与 平面内 的一条直线 平行,则该直线与平面平行。
性质定理:若一条直线 平行于 一个平面,且经过该直线的 另一个平面 与该平面 相交,则交线 平行于 该直线。
线面平行的核心思路:「线线平行 ⇄ 线面平行」——找一条平面内的平行线即可证。
面面平行
判定定理:若一个平面内有 两条相交直线 都平行于另一个平面,则这两个平面平行。
性质定理:
- 若两个平面平行,则其中一个平面内的 任何直线 都平行于另一个平面。
- 若两个 平行平面 同时与 第三个平面 相交,则两条交线 平行。
面面平行的核心:「相交两线分别线面平行」——一条不够,必须 两条相交。
平行的传递性
| 命题 | 是否成立 |
|---|---|
| 线线平行 → 线线平行 | ✓(在空间中也成立) |
| 线面平行 → 线面平行 | ✗(不一定) |
| 面面平行 → 面面平行 | ✓ |
| 平行于同一直线的两直线 | ✓ |
| 平行于同一平面的两直线 | ✗(可能平行 / 相交 / 异面) |
| 平行于同一平面的两平面 | ✓ |
空间中的垂直关系
线线垂直
空间两直线垂直 包括 异面垂直,不要求 两直线相交。
判定常用结论:
- 若 ,,则 。
- 若 ,,,,则 ,进而垂直于 内任意直线。
线面垂直
定义:若一条直线与一个平面内的 任意一条 直线都垂直,则称该直线与平面 垂直。
判定定理:若一条直线与平面内的 两条相交直线 都垂直,则该直线与平面垂直。
性质定理:
- 若 ,,则 。
- 垂直于同一平面的两直线 平行:。
线面垂直证 两条相交线 即可,不需要也无法验证「任意直线」。
面面垂直
定义:两个平面相交,所成的二面角是 直二面角 时,这两个平面 垂直。
判定定理:若一个平面经过 另一个平面的垂线,则这两个平面垂直。
性质定理:若两个平面垂直,则 一个平面内 垂直于交线的直线必 垂直于另一个平面。
三垂线定理
三垂线定理:在平面内的一条直线,如果与平面 斜线 在该平面上的 射影 垂直,那么它也与这条斜线 垂直。
三垂线逆定理:在平面内的一条直线,如果与 斜线本身 垂直,那么它也与斜线的 射影 垂直。
「三垂线」是指:线面垂直(PA⊥α)、射影垂直(a⊥OA)、斜线垂直(a⊥PA)三者之间的关系。
实际书写时:「线 ⊥ 影 ⇒ 线 ⊥ 斜」是最常用方向。
垂直关系总结
| 命题 | 是否成立 |
|---|---|
| 垂直于同一直线的两直线 | ✗(可能平行 / 相交 / 异面) |
| 垂直于同一平面的两直线 | ✓ |
| 垂直于同一直线的两平面 | ✓ |
| 垂直于同一平面的两平面 | ✗(可能平行 / 相交) |
多面体
棱柱
-
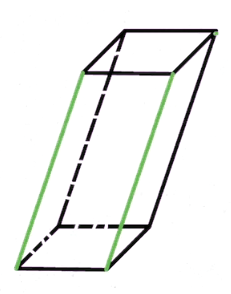
棱柱:上下底面平行(且全等),各侧面都是四边形,侧面的公共边相互平行。
-
棱柱分为直棱柱和 斜棱柱(右图)。
-
底面是 边形,叫做 棱柱。
-
底面为正 边形,叫做正 棱柱。
-
侧棱竖直的 棱柱,叫做直 棱柱。
-
底面是平行四边形,叫做平行六面体。
根据祖暅原理,任何棱柱都可以转化为一个长方体,从而:
棱锥
-
侧面都是三角形,有公共顶点。
-
底面是 边形,有 个侧面,叫做 棱锥。
-
底面是正 边形,且顶点在底面上的投影在底面中心,叫做正 棱锥。
-
有一条侧棱竖直的 棱锥,叫做直 棱锥。
根据祖暅原理,任何棱锥都可以转化为一个正棱锥,从而:
证明:
其中:
注意到:
因此:
这个公式对所有椎体成立。
棱台
- 将棱锥用一个平行于底面的平面截下,下半部分叫做棱台。
根据祖暅原理,任何棱台都可以转化为一个圆台,从而根据:
棱台的体积公式也可以描述为一种希罗平均数:
用以计算棱台或圆台的体积等于棱台或圆台的高乘以两底面面积的希罗平均数。
希罗平均数也可以看成算术平均数与几何平均数的加权平均数。
旋转体
圆柱
-
将一个长方形绕着一条边(轴)旋转得到的立体几何图形。
-
侧面的每一条平行于轴的线称为母线。
显然。
圆锥
-
将一个直角三角形绕着一条直角边(轴)旋转得到的立体几何图形。
-
直角三角形的每一个斜边对应的线称为母线。
根据祖暅原理:
也可以用定积分算。
表面积可以直接拆分为侧面和底面:
其中 表示母线的长度:
圆台
-
将一个直角梯形绕着它的直角边(轴)旋转得到的立体几何图形。
-
直角梯形的每一个斜边对应的线称为母线。
-
也可以视为将圆台用一个平行于底面的平面截下,下半部分叫做圆台。
根据辛普森法则:
表面积同样可以拆分:
其中 表示母线的长度:
方法总结
投影法
三棱锥 中,点 在平面 中的射影为 :
- 若 ,则 是 的 外心。
- 若 、、 与平面 所成角相等,则 是 的 外心。
- 若 到 各边的距离相等,则 是 的 内心。
- 若三侧面与底面所成的二面角相等,则 是 的 内心。
- 若 ,,,则 是 的 垂心。
- 若 ,,,则 是 的 垂心。
补形补体
- 若四面体有三条棱两两相互垂直,则可将其放入某个长方体内。
- 若四面体的四个面均是直角三角形,则可将其放入某个长方体内。
- 正四面体 可以补形为正方体且正方体的棱长 。
- 若四面体的三组对棱分别相等,则可将其放入某个长方体内。
截面问题
找截面有交线法和平行线法两个常用的方法,我喜欢先用平行线,然后找交线。
- 连接被截的若干点。
- 做面上的平行线、延长线。
- 算长度,勾股判断图形。
最值问题
立体几何中的最值问题主要有 类:
- 距离最值:动点在某曲面 / 棱上运动,求到定点或定线的距离最大 / 最小。
- 角度最值:动点变化时求线线、线面、面面所成角的取值范围。
- 体积 / 表面积最值:给定约束(如总棱长、内接 / 外切关系),求体积或表面积极值。
- 路径最值:将立体表面 展开 为平面,化曲为直求最短路径。
常用思路:
- 降维化平面:将立体问题转化为平面几何(展开法)。
- 建系坐标化:建立空间直角坐标系,用 基本不等式 或 导数 求最值。
- 函数化处理:设变量 ,将所求表达为 ,求极值。
正方体表面上,蚂蚁从顶点 沿表面到对顶点 的最短路径——展开两面 为平面后取直线段长度,结果为 ( 为棱长)。
翻折问题
翻折问题 是将平面图形沿某条线 翻折 成立体图形后求各种量的问题。
解题要点:
- 分清不变量:翻折前后 位于折线同侧 的长度、角度 保持不变;跨越折线 的长度、角度 可能改变。
- 建立坐标系:找出翻折后两两垂直的直线作为坐标轴。
- 抓住关键角:通常题目会给定翻折后某条棱的长度或某个二面角,由此确定立体图形的形状。
「同侧不变,跨折可变」 是处理翻折问题的核心口诀。
反射问题
反射问题 是空间几何中关于光线 / 路径在平面镜(或球面)上 反射 的轨迹问题。
主要类型:
- 对称法:利用「入射角 = 反射角」,将反射点处的图形 关于镜面对称,化反射路径为直线段。
- 多次反射:连续在多个镜面间反射,每次都做对称变换,最终得到一条直线。
反射问题的本质:「沿对称面镜像后,反射轨迹变直」——这与「光线沿直线传播」的物理意义一致。
球的概述
球的定义
一个半圆绕着它的直径(轴)旋转得到的立体几何图形。
球内两个端点在球面上且过球心的线段称为直径。
根据球心 称一个球为「球 」。
球的体积表面积
根据辛普森法则:
根据球的表面积等于其外接圆柱的侧面面积(详细看 3B1B 的视频):
球中的定值问题
画一个圆,画出上下两个椭圆表示两个截面,有勾股定理。
球中的最值问题
球中的最值问题主要有 类:
- 点到球面的距离最值:设球心 、半径 ,球外一点 ,则 到球面的最近距离为 ,最远距离为 。
- 直线 / 平面与球的相交问题:直线与球相交时,弦长 ,其中 是球心到直线的距离。
- 内接 / 外切的体积最值:圆柱 / 圆锥与球内接 / 外切,设变量后用导数或基本不等式求极值。
球与几何体内接 / 外切问题的关键是 抓住球心位置 与 半径长度 的几何关系。常用结论:
- 球内接长方体:球心是长方体的 体对角线中点,。
- 球内接正方体:。
- 球外切正方体:。
外接球问题
方体的外接球
容易发现,长方体外接球直径就是其对角线的长度,也就是:
棱锥的外接球
我们尝试求出外接球的半径 找到三棱锥的一个底面 ,容易发现外接球的球心 在底面的投影一定是 的外心(),另外根据 ,那么就有:
其中 为底面外接圆半径,可以通过正弦定理求出。
特殊地,若顶点在底面任意顶点正上方,则外接球球心位与底面外接圆正上方 处。
对于 棱锥也类似。
棱柱的外接球
同样是找底面的外接圆圆心,然后向上做高 即可。
特殊地,如果是直棱柱, 其中 是体的高度。
三棱锥内切球
注意到可以将三棱锥分为,等面积法:
即: